What is Point Cloud?
Introduction
We depict the surface of the object with points, and memorize the coordinates of the points
Pros and Cons
Pros:
- Can represent fine structures without huge numbers of points
Cons:
- Point clouds are just scattered points, they don’t contain information about
- Which points are connected to each other
- What’s the actual surface look like
Tasks
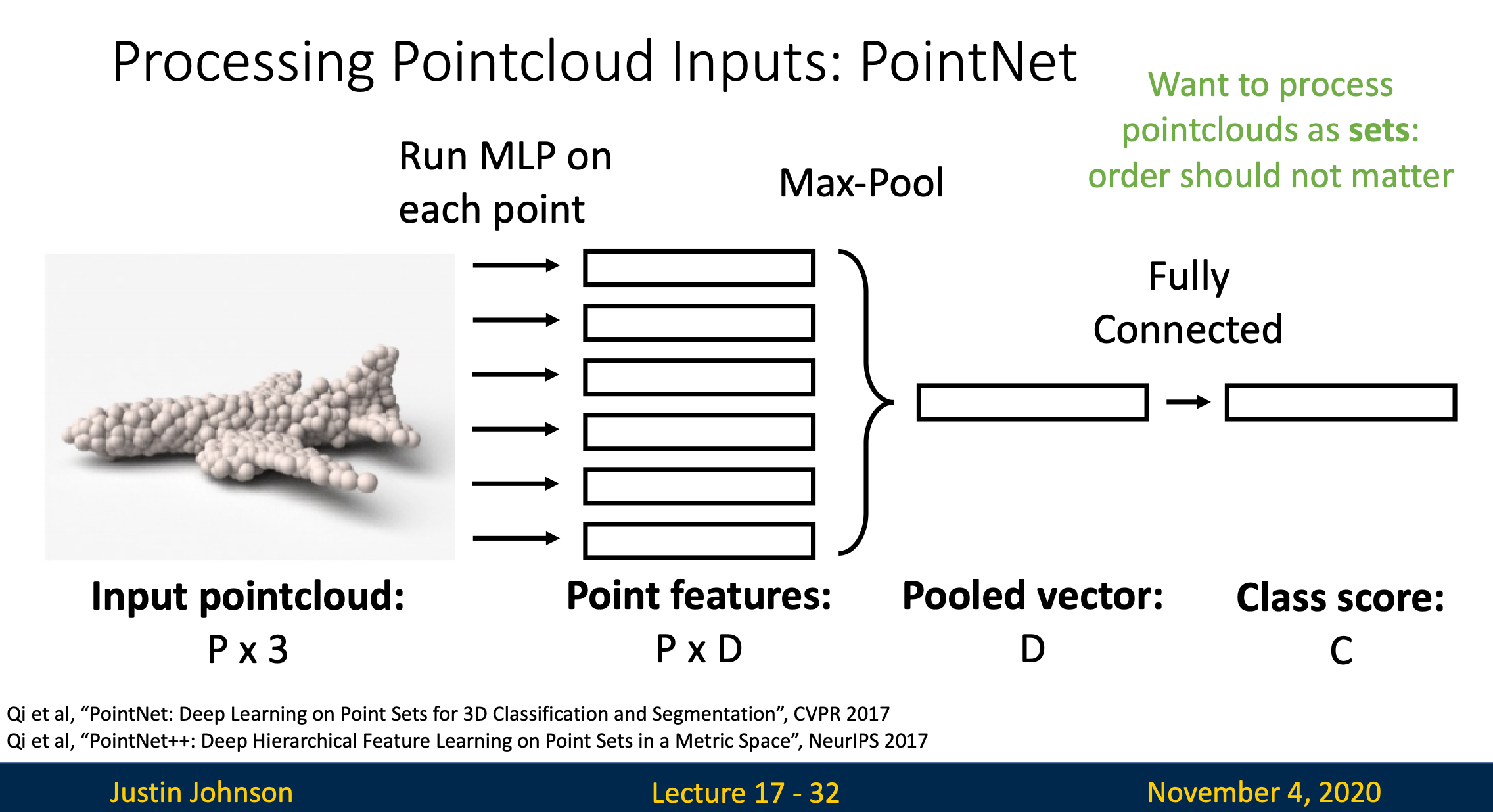
Processing Point Cloud Inputs: PointNet
- First, we process every coordinate one by one with the same fully-connected network
- Next, we do max pooling on the outputs
- Eventually, we pass the feature vector into fully-connected network and output class scores
Processing the coordinates one by one can avoid the order of the coordinate affect the result
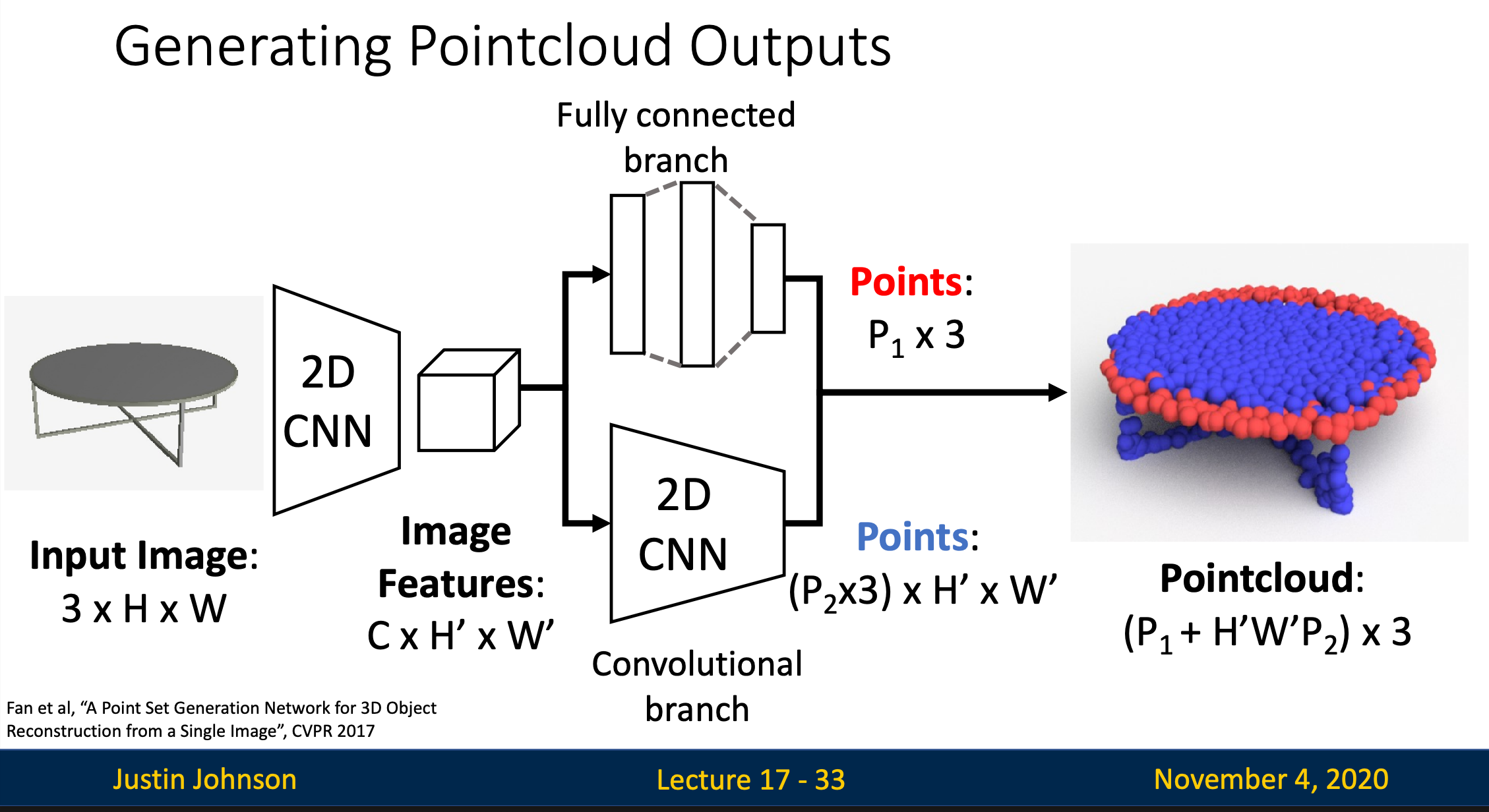
Generating Point Cloud Outputs
1. Feature Extraction
We use 2D CNN to extract feature from input image
2.1 Fully Connected Branch
- We straighten the image features and send it into fully connected network to predict fix number of points ()
- Fully connected network is good at learning the overall structure of the object, but bad at predicting the detail of the object
2.2 Convolutional Branch
- We send image features into 2D CNN to predict points for every spatial position ()
- Convolutional layer, on the other hand, is good at predicting details of the object
3. Output Aggregation
Finally, we combine the points predicted by fully connected network and CNN to get the final output
Loss Function: Chamfer Distance
Requirement
We need a way to compare the point clouds as sets. That is, we don’t want the order we memorize the coordinate affect the final result
Chamfer Distance
subscript 2 means square root
i.e.