Why We need Backpropagation?
Why we need backpropagation?
We’ve learned in lecture 4 that we need the gradient of the loss to optimize our model. If we directly compute the gradient by definition, it will be a disaster
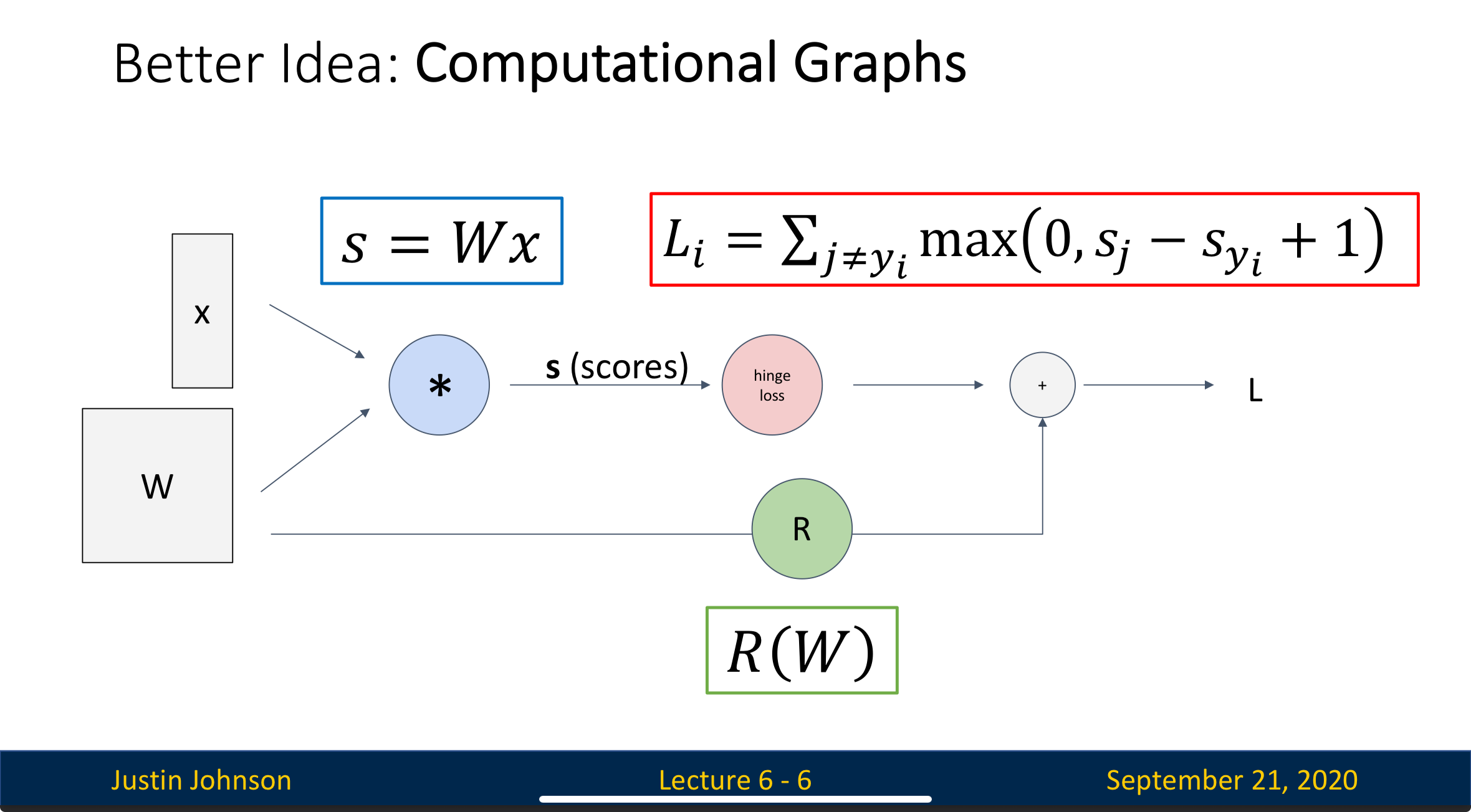
Take SVM as example:
This simple linear classifier with SVM loss function already has this complex gradient formula, how about more complex models? Hence, a better way to calculate gradient is necessary
Backpropagation is exactly an efficient way to help us calculate the gradient
Simple Introduction to Backpropagation
Computational Graph
To understand backpropagation, the first thing we need to do is to turn the process of neural network into a computational graph
The input data goes from the left of the graph to the right to produce output, this process is called “forward pass”
Process
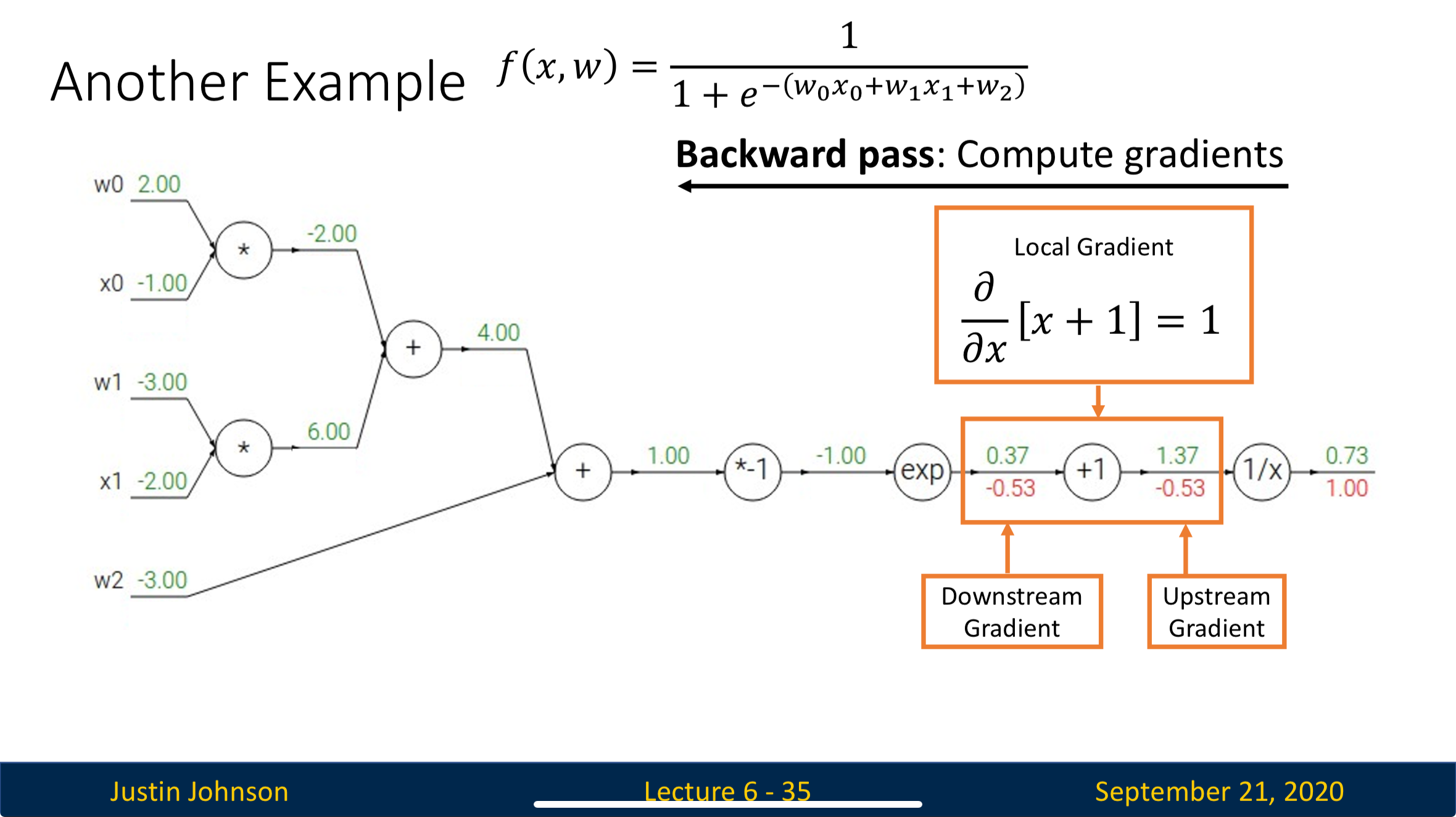
Step 1: Forward Pass
The data flows forward through the network, producing a prediction
Step 2: Loss Calculation
The prediction is then put into the loss function to produce the loss
Step 3: Backward Pass
The algorithm then works backward from the output to the input. During the process, we can efficiently calculate the gradient of loss with respect to the weight of the layer
The gradient tells us how much each weight contributes to the total loss, i.e.
Step 4: Weight Update
We can then update the weight based on the gradient
How Data is Processed in Backward Pass
Concepts
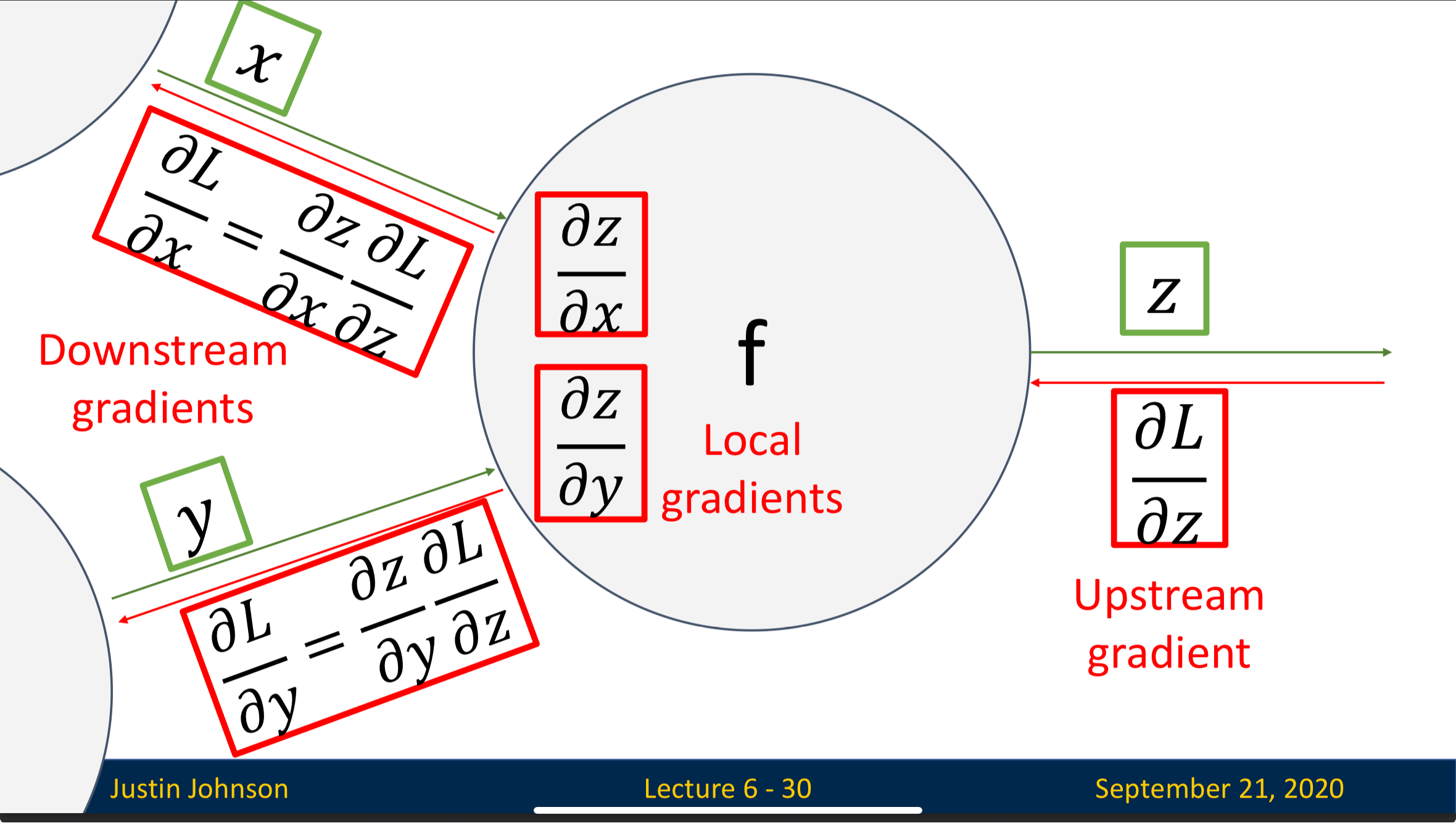
Upstream Gradient: The gradient flows into the neuron, representing how loss changes as the neuron’s output () change
Local Gradient: The gradient that represent how much the neuron’s output changes when its input changes
Downstream Gradient: The gradient that flows out of the neuron, which is the upstream gradient of the next neuron
Process
We’ll focus on this single neuron
- The neuron receives the upstream gradient, we don’t need to know how it is calculated since it’s the task of previous neuron
- Using the input and output of the neuron when conducting forward pass, we can get the local gradients
- By multiplying upstream gradient with local gradient, we can get the downstream gradient, which we’ll pass to the next neuron
By process above, we conclude that
Define Complex Primitives Instead of Simple Ones
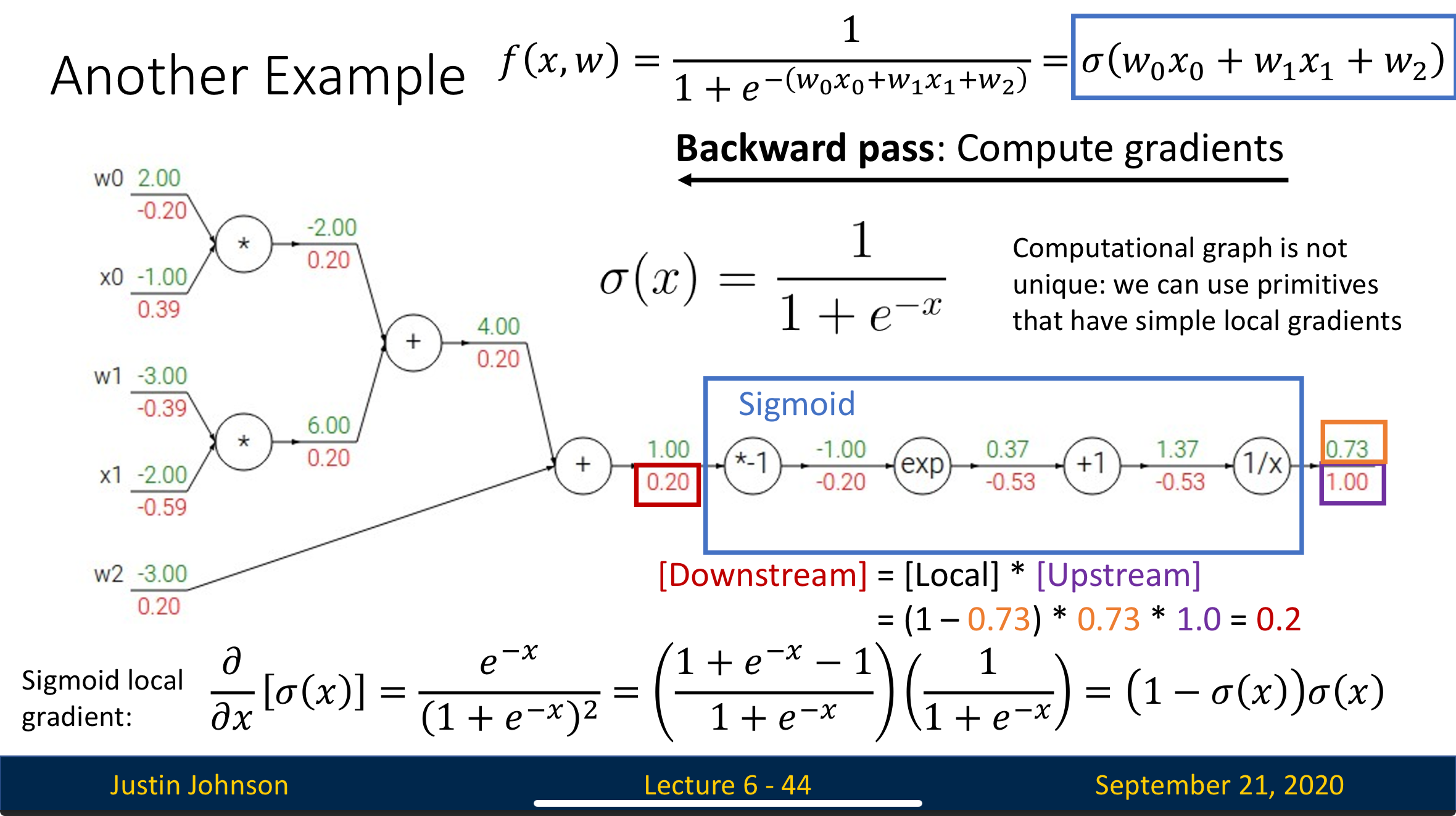
We usually combine several successive simple primitives into one complex primitive to decrease computation since the more neuron you have, the more dot product computation you’ll need
Take the computational graph below as example:
If we combine the four circled neurons into one sigmoid neuron, then we’ll only need to compute once to complete the computation that we previously need four computation to achieve
Backpropagation in Vector-Valued Function
Dimensions
- Upstream Gradient
- Downstream Gradient
- Local Gradient
Jacobian
For and , then is matrix with
Trap When Calculating Gradient
Concept
There are two ways (implicit, explicit) to calculate gradient, we prefer implicit multiplication over explicit due to memory efficiency
Explicit Jacobian Formation: In this method, we first form the Jacobian matrix (), then do matrix vector multiplication to get the downstream gradient
Implicit Multiplication: In this method, we never actually form the entire Jacobian matrix. Instead, we directly compute element-wise without storing intermediate matrices
Explanation
When the number of features gets large, will be a huge number. If we choose to do the computation explicitly, we’ll need to store values, which exceed the GPU memory.
On the other hand, calculate it implicitly won’t create any intermediate matrix, making this method memory efficient
Also, most of the time, the Jacobian matrix is sparse, meaning most of the entries are useless, which waste a lot of memory
How to understand Backpropagation of High-Dimensional Input & Output
Hard to explain, see UMich Lecture 6: Backpropagation start from 47:50
Backpropagation: Another View
Reverse-Mode Automatic Differentiation
f_1 f_2 f_3 f_4
x_0 ---> x_1 ---> x_2 ---> x_3 ---> L
For the diagram above, we can calculate the partial derivatives of loss with respect to by the formula below:
Since matrix multiplication is associative, we can calculate it in any order. If we multiply from right to left, we can avoid doing matrix-matrix multiplication, which is time inefficient. Instead, calculating from right to left gives us matrix-vector multiplication
Forward-Mode Automatic Differentiation
f_1 f_2 f_3 f_4
a ---> x_0 ---> x_1 ---> x_2 ---> x_3
For the diagram above, we can calculate partial derivatives of with respect to by the formula below:
This is seldom seem in machine learning. Instead, it is often seen in other computer science fields
Hessian-Vector Products via Backpropagation
The Problem
Computing the full Hessian matrix (second derivatives) is expensive - it requires memory and computation for n parameters. But often we only need the Hessian multiplied by a vector v, not the full matrix.
The Solution: A Clever Trick
Instead of computing the Hessian directly, we can use backpropagation twice:
- First backprop: Compute the gradient
- Second backprop: Treat as a new “loss” and backpropagate through it
The Key Insight
The mathematical trick is:
This means: “The Hessian-vector product equals the gradient of the dot product (∂L/∂x₀)·v”
The Process
f_1 f_2 f_2^T f_1^T *v
x_0 ---> x_1 ---> L ----> dL/dx_1 ----> dL/dx_0 ---> (dL/dx_0)v
When we backpropagate through this extended computation graph, we get the Hessian-vector product as the gradient with respect to .
Why This Works
Backpropagation automatically applies the chain rule. By making our “input” backprop computes its derivative with respect to , which is exactly the Hessian-vector product we wanted!